01.03.2022 Digitalisierung/Robotik/KI
Robotergestützte Telechirurgie – Anfänge und Perspektiven

Die Telechirurgie ist definiert als ein Operationsverfahren, bei dem Chirurg:innen von einem anderen Ort aus operieren als dem, an dem sich die Patient:innen im Operationssaal befinden. Die Durchführung von telechirurgischen Operationen in der Militärchirurgie war der ursprüngliche Anreiz zur Entwicklung von Mehrzweck-Robotiksystemen für die Chirurgie. Es ging darum, eine mobile chirurgische Einheit in einem gepanzerten Fahrzeug zu Verwundeten zu bringen, anstatt diese in das nächstgelegene mobile chirurgische Armeekrankenhaus (Mobile Army Surgical Hospital, kurz MASH) zu evakuieren. Durch die telechirurgische Bedienung des Robotiksystems vom MASH aus gelänge eine sofortige chirurgische Kontrolle noch im Kampfgebiet, ohne die Verwundeten transportieren zu müssen, und ohne das chirurgische Team in die Gefahrenzone zu bringen [1].
Die technischen Herausforderungen der weltweit ersten Telechirurgie
Die französische nationale Forschungsbehörde (Agence Nationale de Valorisation de la Recherche, ANVAR) bewertete erste Projektvorschläge als „weder ehrgeizig noch innovativ genug“ und löste damit die Idee einer transatlantischen robotergestützten Telechirurgie aus. So entstand das europäische Projekt MASTER (Minimal Access Surgery by Telecommunication and Robotics), eine Kollaboration zwischen dem IRCAD und der Robotikfirma Computer Motion.
Ursprünglich waren die chirurgischen Robotiksysteme für die Verwendung innerhalb eines Operationssaals konzipiert und zugelassen, mit mechanischen Kabelverbindungen und nur wenigen Metern Abstand zwischen Konsole und Operationstisch. In Vorbereitung auf die weltweit erste telechirurgische Operation mit dem ZEUS-System (Computer Motion, USA) war zunächst eine Modifikation der Systemkomponenten erforderlich, sodass deren Verbindung über eine größere Distanz technisch möglich wurde. Dies gelang durch Einsatz eines Glasfaseranschlusses, der heute auch für die Doppelkonsole genutzt wird.
Weitere limitierende Faktoren für die Telechirurgie waren die Bandbreite und die Zeitverzögerung (Latenz) der Telekommunikationsleitungen über eine große Entfernung sowie die Zeit, die für die Umwandlung von Videobildern und chirurgischen Bewegungen in elektronische Signale benötigt wird. Eine optimale Signalübertragung zwischen zwei Standorten erfordert eine minimale Latenzzeit, die wiederum von mehreren Komponenten abhängt.
Als Netz konnte nur ein terrestrisches Hochgeschwindigkeits-Glasfasernetz (France Telecom/Equant) in Betracht gezogen werden, da geosynchrone Satellitensysteme eine zu hohe Latenz aufweisen. Um Verzögerungen zu vermeiden, wurde das Netzwerk ausschließlich für den Eingriff zur Verfügung gestellt und eine Bandbreite von 10 Mbit/s reserviert. Der Datentransport erfolgte über das Kommunikationsprotokoll ATM (Asynchronous Transfer Mode) mithilfe einer Network Termination Unit (NTU), die das Zählen der gesendeten und empfangenen Datenpakete ermöglichte, um eventuelle Datenverluste zu quantifizieren [2]. Ein weiterer Einflussfaktor auf die Gesamtlatenz ist die Komprimierung und Dekomprimierung von Audio- und Videosignalen. Je leichter die Komprimierungsmethode ist, desto geringer ist die Verzögerung – aber es wird auch eine entsprechend größere Bandbreite benötigt [3]. Für einen sicheren transatlantischen Eingriff mussten die Ingenieure von France Telecom daher neue Codecs für die Signalumwandlung von Video, Ton und insbesondere chirurgischer Steuerung entwickeln. Der Einsatz dieser Codecs konnte die Latenz bei der gegebenen Bandbreite auf ein für das menschliche Auge praktisch nicht wahrnehmbares Niveau begrenzen.
In Vorstudien – robotergestützte Cholezystektomien am Tiermodell – wurden die Latenzgrenzen für einen sicheren telechirurgischen Eingriff ermittelt. Zu diesem Zweck wurden in einem ersten Schritt die Konsolensignale vom IRCAD Straßburg nach Paris hin- und hergeschickt, was einer Signallaufstrecke von etwa 1.000 km entspricht. Von der Ausgangslatenz von 20 ms wurde die Latenz künstlich auf 551,5 ms erhöht, um eine sichere Höchstgrenze für die Latenz zwischen der Ausführung einer Aktion und ihrer Auswirkung auf den Videomonitor zu definieren (330 ms).
In einem zweiten Schritt wurde eine transatlantische Verbindung mit der Steuerung in New York und dem Operationssaal in Straßburg hergestellt, entsprechend einer Signallaufstrecke von über 14.000 km. Bei diesen Operationen ging kein ATM-Paket verloren. Die ATM-Transportverzögerung betrug 78–80 ms, hinzu kamen 70 ms für die Videocodierung und -decodierung sowie einige Millisekunden für die Ratenanpassung und die Umwandlung von Ethernet- in ATM-Pakete. So waren die chirurgischen Bewegungen in New York innerhalb von 155 ms auf dem Bildschirm zu sehen. Nach der erfolgreichen Durchführung am Tiermodell erfolgte die Genehmigung der Ethikkommission für die Operation Lindbergh [2].
Die Operation Lindbergh
Die Weltpremiere in der robotergestützten Telechirurgie ist die Operation Lindbergh, benannt in Anlehnung an die erste Alleinüberquerung des Atlantiks im Nonstopflug von New York nach Paris durch Charles Lindbergh. Am 7. September 2001 gelang es dem Team von Professor Jacques Marescaux, von New York aus eine transatlantische, vollständig ferngesteuerte, robotergestützte Cholezystektomie mit dem ZEUS-System bei einer Patientin in der Straßburger Universitätsklinik durchzuführen. Ursprünglich war geplant, die Konsole in einem amerikanischen Krankenhaus aufzustellen. Stattdessen musste ein Büro des Telekommunikationspartners in New York gewählt werden, denn obwohl es zu dieser Zeit in mehr als 200 Ländern ATM-Hochgeschwindigkeits-Glasfaserverbindungen gab, waren die meisten Krankenhäuser nicht mit dieser Technologie ausgestattet.
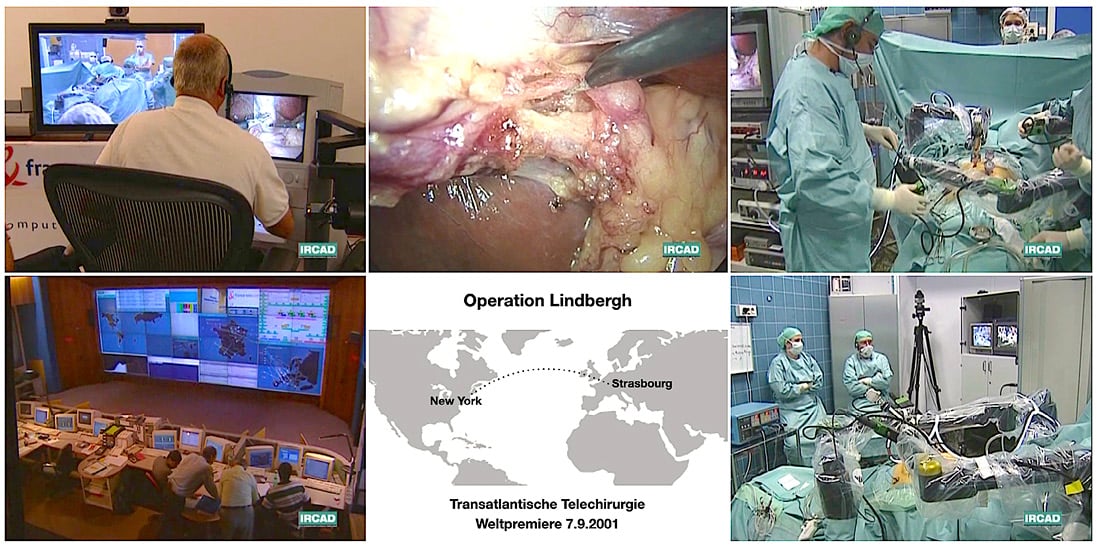
Abb.1: Operation Lindbergh. Operateur an der ZEUS-Konsole in New York (oben links), intraoperative Bildqualität (oben Mitte), Straßburger Team beim Andocken der ZEUS-Roboterarme (oben links), Überwachung der transatlantischen Verbindung durch Telekommunikationsingenieure in Paris (unten links), Straßburger Team während der Telechirurgie (unten rechts).
Zunächst platzierte das Straßburger Operationsteam bei der Patientin die Trokare, insufflierte die Bauchhöhle und dockte das ZEUS-System an (16 Minuten). Anschließend wurde das Robotiksystem von der Konsole in New York aus über den Atlantik hinweg gesteuert, wobei der robotische Kameraarm (AESOP) per Sprachsteuerung und die beiden Instrumentenarme per Hand gelenkt wurden. Über eine Audioverbindung via Headsets wurde das Straßburger Team instruiert, wann die elektrochirurgischen Pedale zu aktivieren waren. Während des gesamten Eingriffs wurde eine Latenzzeit von 155 ms gemessen, die praktisch nicht wahrnehmbar war. Die laparoskopische Cholezystektomie dauerte 54 Minuten, wobei etwa 10 Minuten für den Wechsel der robotischen Instrumente für die unterschiedlichen Operationsschritte benötigt wurden [2, 4].
Weitere Entwicklungen in der Telechirurgie
Inspiriert von dieser bahnbrechenden Errungenschaft, wurde im Jahr 2003 in Kanada der weltweit erste nationale Telechirurgiedienst eingerichtet. Das Programm entstand als Erweiterung einer bestehenden Telementoring-Zusammenarbeit zwischen einem Lehrkrankenhaus und einem kommunalen Krankenhaus. Durch On-the-Job-Training des Chirurgen vor Ort konnte dieser im Verlauf der Telechirurgie-Fallserie einige robotergestützte Eingriffe unter Teleassistenz des Experten übernehmen. Im Rahmen dieser Kollaboration erfolgten insgesamt 22 Eingriffe (Fundoplikationen, kolorektale Resektionen und Leistenhernien-Operationen). Mit einer IP/VPN-Verbindung (Internet Protocol/Virtual Private Network) über eine Entfernung von 400 km betrug die Latenzzeit 135–150 ms [5]. Trotz der Neuartigkeit dieses Verfahrens und der erheblichen technischen Anforderungen traten bei diesen Pioniereingriffen wie bei der Operation Lindbergh keine größeren intraoperativen Komplikationen auf, und der postoperative Verlauf war unauffällig [2, 4, 5].
Die weiteren Entwicklungen waren über fast 20 Jahre hinweg vergleichsweise spärlich und bewegten sich vor allem in der präklinischen Erprobung. 2008 wurde ein da Vinci-Telechirurgie-Prototyp (Intuitive Surgical, USA) eingesetzt [6]. In Studien mit Robotik-Simulatoren wurde bestätigt, dass die ideale Latenzzeit für die Telechirurgie weniger als 200 ms beträgt [7], und bei über 300 ms ein messbarer Leistungsabfall auftritt [8].
Die Telechirurgie wurde zwar erfolgreich eingeführt und erprobt, ist jedoch mit erheblichen Kosten für robotergestützte chirurgische Systeme und Telekommunikationsinfrastruktur verbunden.
Mit dem Aufkommen der Mobilfunktechnologie der fünften Generation (5G) hat das Interesse an der Telechirurgie aktuell neuen Schwung gewonnen. Die zunehmende Verfügbarkeit von 5G verspricht für die Aufrechterhaltung von Konnektivität mit extrem niedriger Latenz über geografische Grenzen hinweg weniger kostspielig zu sein, sodass eine gesteigerte Nachfrage nach Telechirurgie erwartet wird [3]. Bei diversen Robotiksystemen, die bereits jetzt verfügbar sind bzw. kurz vor der Markteinführung stehen, wird mit reduzierten Kosten und Fernsteuerbarkeit geworben. Wiederholt wurde über den Einsatz 5G-gestützter Telechirurgie mit verschiedenen Robotiksystemen berichtet, jedoch überwiegend unter Laborbedingungen [9]. Weiterhin nennenswert ist eine klinische Fallserie von Wirbelsäulenoperationen bei zwölf Patient:innen, bei denen an verschiedenen Standorten telechirurgisch insgesamt 62 Pedikelschrauben implantiert wurden, über Distanzen von 120–3000 km [10].
Perspektiven
Der mögliche Nutzen der Telechirurgie umfasst nicht nur vollständig ferngesteuerte Eingriffe. Vielmehr ermöglicht dieses Verfahren spezialisierten Chirurg:innen, auf internationaler Ebene zusammenzuarbeiten und ihre Erfahrung und praktischen Fertigkeiten mit dem chirurgischen Nachwuchs an jedem Ort der Welt zu teilen. Durch gezielte Interventionen aus der Ferne ergänzen Expert:innen die vor Ort vorhandenen Fähigkeiten. Beim chirurgischen Telementoring kann die Telepräsenz schrittweise von verbaler Anleitung zu visuellen Hilfsmitteln (Telestration) und schließlich zur Fernsteuerung von Instrumenten (robotergestützte Telechirurgie sowie Teleassistenz) übergehen. Somit erlaubt es die Robotik, bei Bedarf das Telementoring durch gezielte Interventionen bei schwierigen Operationsschritten zu ergänzen. Beispielsweise kann ein spezialisiertes Zentrum mit kompatiblen Systemen an anderen Orten verbunden werden, um zahlreiche angeschlossene Krankenhäuser zu unterstützen [5, 10]. Die in diversen Studien für die Video- und Robotersignale verwendeten Bandbreiten reichten von 10 bis 40 Mbit/s. 5G bietet eine deutlich höhere Datenrate im Bereich von > 1 Gbit/s bei einer Netzwerklatenz von 1 ms, und auch 6G zeichnet sich schon am Horizont ab [3, 9]. Aktuelle Studien widmen sich der weiteren Reduktion der Latenzzeit und der Minimierung von Datenschwankungen in Netzwerken [11, 12].
Eine zusätzliche Reduktion der Latenzzeiten in der Telechirurgie ist möglicherweise durch den Einsatz fortgeschrittener Systeme auf der Grundlage künstlicher Intelligenz (KI) erreichbar: Dabei versucht die sendende Seite vorherzusagen, wie die empfangende Seite reagiert / reagieren wird, und die empfangende Seite versucht vorherzusagen, was die sendende Seite tut / tun wird. Dieses Prinzip wird bereits in globalen Multiplayer-Spielen eingesetzt, bei denen die Auswirkungen von Spielaktionen nicht von Personen auf der anderen Seite der Welt abgewartet werden können. Aktuell können mit solchen KI-Systemen bereits Vorhersagen von etwa 100 ms erreicht werden [3]. Durch die drahtlose Übertragung ist mit 5G eine Konnektivität zwischen etlichen Geräten möglich. Immer höhere Netzwerkkapazitäten werden die simultane Integration von Video- und Robotersignalen sowie von zusätzlichen Informationen wie haptischem Feedback, KI-Assistenzsystemen oder Virtual- und Augmented-Reality-Umgebungen ermöglichen [3, 9].
In Zusammenfassung haben die Telechirurgie und die laufende 5G-Einführung ein immenses Potential zur Multiplikation des Wissenstransfers in der Chirurgie. Dank einer zuverlässigen Fernverbindung werden Expert:innen praktisch jeden Operationssaal auf der ganzen Welt betreten können, um dort zu beraten und zu intervenieren. Es wird erwartet, dass die Verfügbarkeit von Telechirurgie die Möglichkeiten erweitert, spezialisierte Behandlungen ortsunabhängig zu erhalten. Damit dient die robotergestützte Telechirurgie der Vision eines gerechten und globalen Zuganges zu hochwertiger chirurgischer Versorgung.
Literatur
[1] George, E.I., et al., Origins of Robotic Surgery: From Skepticism to Standard of Care. JSLS, 2018. 22(4).
[2] Marescaux, J., et al., Transatlantic robot-assisted telesurgery. Nature, 2001. 413(6854): p. 379-80.
[3] Dohler, M., The Internet of Skills: How 5G-Synchronized Reality Is Transforming Robotic Surgery, in Robotic Surgery, F. Gharagozloo, et al., Editors. 2021, Springer Nature Switzerland AG p. 207-215.
[4] Marescaux, J., et al., Transcontinental robot-assisted remote telesurgery: feasibility and potential applications. Ann Surg, 2002. 235(4): p. 487-92.
[5] Anvari, M., Remote telepresence surgery: the Canadian experience. Surg Endosc, 2007. 21(4): p. 537-41.
[6] Nguan, C., et al., Pre-clinical remote telesurgery trial of a da Vinci telesurgery prototype. Int J Med Robot, 2008. 4(4): p. 304-9.
[7] Xu, S., et al., Determination of the latency effects on surgical performance and the acceptable latency levels in telesurgery using the dV-Trainer((R)) simulator. Surg Endosc, 2014. 28(9): p. 2569-76.
[8] Perez, M., et al., Impact of delay on telesurgical performance: study on the robotic simulator dV-Trainer. Int J Comput Assist Radiol Surg, 2016. 11(4): p. 581-7.
[9] Börner Valdez, L., et al., 5G mobile communication applications for surgery: An overview of the latest literature. Artificial Intelligence in Gastrointestinal Endoscopy, 2021. 2(1): p. 1-11.
[10] Tian, W., et al., Telerobotic Spinal Surgery Based on 5G Network: The First 12 Cases. Neurospine, 2020. 17(1): p. 114-120.
[11] Chu, G., et al., Improved robot-assisted laparoscopic telesurgery: feasibility of network converged communication. Br J Surg, 2021. 108(11): p. e377-e379.
[12] Zhang, Z., et al., Application of deterministic networking for reducing network delay in urological telesurgery: A retrospective study. Int J Med Robot, 2022: p. e2365
Seeliger B: Robotergestützte Telechirurgie – Anfänge und Perspektiven. Passion Chirurgie. 2022 März; 12(03): Artikel 03_03.

Dr. Dr. med. Barbara Seeliger
IHU-Strasbourg, Institute of Image-Guided Surgery
University Hospitals of Strasbourg
Department of General, Digestive, and Endocrine Surgery
IRCAD, Research Institute against Digestive Cancer
ICube, UMR 7357 CNRS, University of Strasbourg
1, Place de l’Hôpital
67000 Straßburg / Frankreich
Weitere aktuelle Artikel

20.01.2026 Digitalisierung/Robotik/KI
Leserbrief
Leserbrief zum Artikel von Dr. Dolores Krauss und Prof. Dr. Hans Fuchs in Passion Chirurgie 11/2026 „Wenn Roboter operieren – Chancen und Grenzen der autonomen Chirurgie“

10.11.2025 BDC|News
Neue Ausgabe der Passion Chirurgie: Digitalisierung & Innovationen in der Chirurgie
Hier geht’s zur neuen Ausgabe der PASSION CHIRURGIE 10/25: Digitalisierung & Innovationen in der Chirurgie

01.11.2025 BDC|News
Editorial 11/2025: Digitalisierung und Innovationen in der Chirurgie
Novemberausgabe der PASSION CHIRURGIE: Die Digitalisierung verändert unsere operative Praxis tiefgreifend: Technische Möglichkeiten wachsen rasant, politische Rahmenbedingungen und ethische Fragen folgen mit Verzögerung. Diese Ausgabe der Passion Chirurgie beleuchtet praxisnah vier zentrale Aspekte dieser Entwicklung – von künstlicher Intelligenz (KI-Anwendungen) über Weiterbildung bis zu elektronischer Dokumentation und robotischer Autonomie.

01.11.2025 Digitalisierung/Robotik/KI
Die ePA – eine juristische Beurteilung
Dieser Beitrag befasst sich mit den rechtlichen Rahmenbedingungen der elektronischen Patientenakte und den hieraus erwachsenden Verantwortlichkeiten und Haftungsrisiken des Arztes.

Korrespondierende:r Autor:in
Prof. Dr. Dr. med. Barbara Seeliger
IHU-Strasbourg, Institute of Image-Guided SurgeryUniversity Hospitals of StrasbourgDepartment of General, Digestive, and Endocrine SurgeryIRCAD, Research Institute against Digestive CancerICube, UMR 7357 CNRSUniversity of Strasbourg
Lesen Sie PASSION CHIRURGIE!
Die Monatsausgaben der Mitgliederzeitschrift können Sie als eMagazin online lesen.