Die Digitalisierung und die fortschreitende Technologisierung wird in den nächsten Jahren vor allem die akademische Chirurgie maßgeblich beeinflussen, doch gerade die Medizin hat in Sachen Digitalisierung einen großen Nachholbedarf. Der Krankenhaus-Report 2019 zeigt, dass Deutschland auf einer Skala von 0 (keine) bis 7 (vollständige Digitalisierung) im europäischen Durchschnitt auf Stufe 2,3 rangiert und somit unter dem europäischen Durchschnitt von 3,6 liegt [1]. Laut einer Umfrage der Technischen Universität München innerhalb der Deutschen Gesellschaft für Chirurgie, war die Mehrheit der Befragten der Meinung, dass die Digitalisierung eine erhebliche Auswirkung auf die berufliche Situation als Ärztin oder Arzt haben wird und votierten eindeutig dafür, dass die Digitalisierung auch die therapeutischen und operativen Aspekte betreffen wird [2].
Im Bereich der Chirurgie des oberen Gastrointestinaltraktes hat die Digitalisierung vor allem im Zusammenhang mit dem Einsatz von robotergestützten Technologien in den letzten Jahren stark zugenommen. Dies mag zum einen an der zunehmenden weltweiten Verbreitung von Robotersystemen und der damit verbundenen zunehmenden Erfahrung der Chirurg:innen mit diesen Systemen liegen. Andererseits hat der technische Fortschritt der Systeme und insbesondere der chirurgischen Instrumente ihren Einsatz vor allem bei komplexen viszeral- und thoraxchirurgischen Eingriffen begünstigt [3].
Ergonomie in der Chirurgie
Die Ergonomie als eigenständige, wissenschaftliche Disziplin befasst sich mit den Wechselwirkungen zwischen Mensch und anderen Elementen eines Systems. In der Chirurgie ist sie immer noch deutlich unterrepräsentiert, obwohl ergonomische Risiken maßgeblich mit dem chirurgischen Fachgebiet assoziiert sind. Durch den verbreiteten Einsatz von Robotern bei langwierigen, komplexen Operationen steigen auch die ergonomischen Herausforderungen für Chirurg:innen. Die Rate von muskuloskelettalen Erkrankungen bei Chirurg:innen liegt laut aktueller Studienlage zwischen 23-80 % zwar im Vergleich zur offenen Chirurgie (66-94 %) vergleichsweise niedriger, zeigt dennoch die alltägliche Relevanz dieser Thematik [4].
Die Auswirkungen einer komplexen robotischen Operation auf das Wohlergehen der Chirurg:innen, aber auch der Einfluss neuer Technologien auf die Arbeitsbedingungen im OP generell bleiben indes bisher unerforscht. Aktuelle Leitlinien und Empfehlungen zur Ergonomie am OP-Robotern wurden vom Arbeiten am Mikroskop übernommen, da die Körperhaltung den Gebrauch des Roboters nachahmt [5].
Eine Befragung von Chirurg:innen im Anschluss an ein ergonomisches Training zeigte in vorangegangenen Studien eine hohe Bereitschaft für ergonomische Fortbildungen. 16,6 ٪ der Chirurg:innen gaben an, zuvor an einem ergonomischen Training teilgenommen zu haben; 100 ٪ fanden das durchgeführte Training hilfreich. Außerdem zeigte die gleiche Studie die Notwendigkeit eines solchen Trainings, da nur 67,9 ٪ der Studienteilnehmer:innen die Armablage korrekt einstellten. (Unterarme parallel zum Boden mit seitlich anliegenden Ellbogen) [6].
Im Folgenden möchten wir die aktuell verfügbaren robotischen Operationssysteme vorstellen und hierbei insbesondere die ergonomischen Besonderheiten in den Fokus stellen.
Da Vinci (Intuitive Surgical, Sunnyvale, CA, USA)
Seit über 21 Jahren auf dem Markt, stellt der Da Vinci von Intuitive Surgical den Marktführer im Bereich der robotischen Operationssysteme dar. Das System besteht aus einer patientenseitigen Robotikeinheit, einer Steuerkonsole und einem Videoturm. Die Robotikeinheit ist je nach Model (Da Vinci Xi, X oder SP) verschieden. Die Konsole ist unterschiedlich einstellbar, um eine ergonomische Arbeitsweise zu ermöglichen, sie verfügt über ein 3D-HD-Display sowie Handsteuerungen zur Bedienung der Instrumente und Fußtritte zur Kameraführung und Anwendung von bi-/monopolaren Instrumenten. Der Da Vinci Xi bietet vor allem bei komplexen chirurgischen Eingriffen, die ein Umlagern des Patienten mit unterschiedlicher Trokarplatzierung notwendig machen, viele Vorteile. Der Da Vinci X bietet hingegen eine kostengünstigere Variante mit weniger Funktionen. Der Da Vinci SP stellt ein Single-Port System dar. Abbildung 1 zeigt die optimale ergonomische Sitzhaltung an der Da Vinci-Konsole. Eine Pilotstudie unserer Klinik konnte zeigen, dass die Armlehne jedoch in weniger als 25 ٪ der Operationszeit genutzt wurde [7].
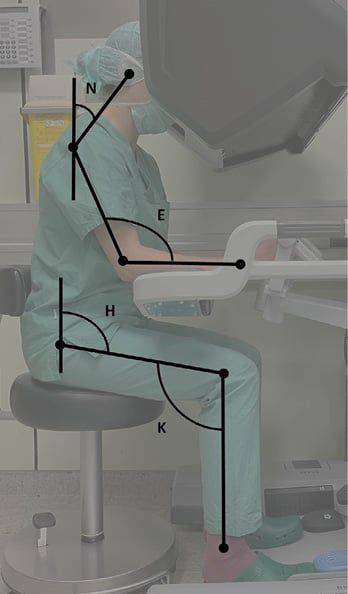
Abb. 1: Ergonomische Sitzhaltung am Da Vinci OP Roboter. Es wird empfohlen einen 90-Grad-Winkel im Kniegelenk zu halten, Oberarme senkrecht zum Boden, Ellenbogen sollten eng am Körper anliegen und im 90-Grad-Winkel gebeugt sein, Unterarme aufliegend auf Armablage.
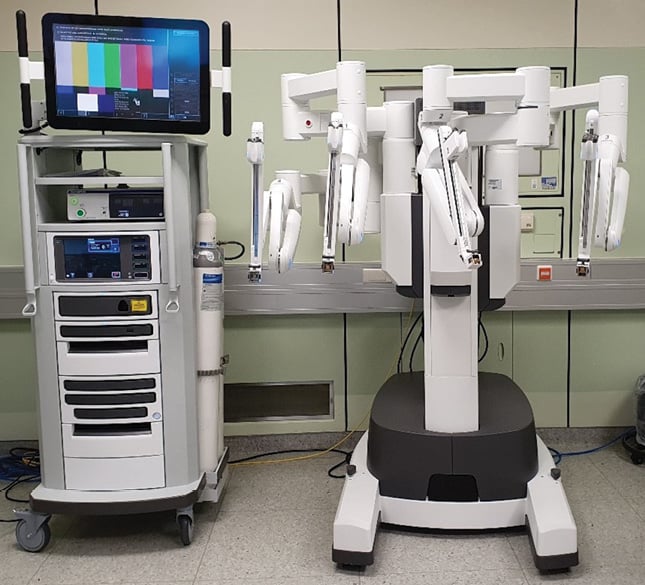
Abb. 2: Da Vinci X Robotikeinheit und Videoturm

Abb. 3: Da Vinci Xi Robotikeinheit und Steuerkonsole
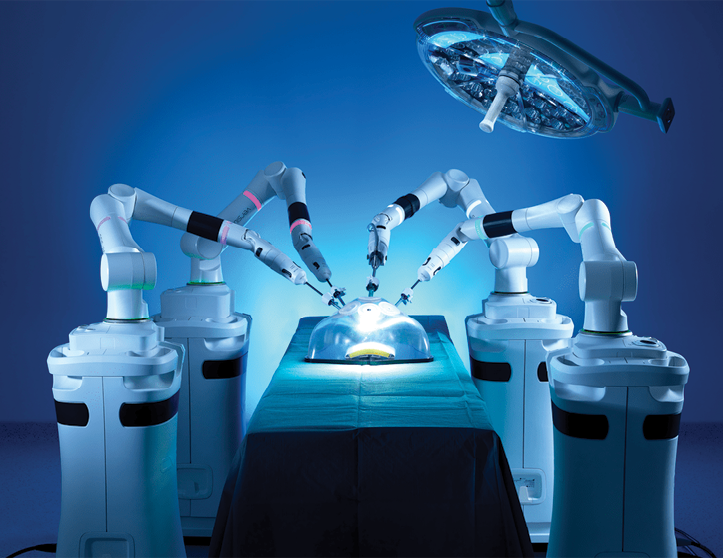
Abb. 4: Das Modulare Design des Versius® ermöglicht eine flexible Platzierung der Robotikeinheiten im OP-Saal.
Versius® Surgical Robotic System (CMR Surgical, Cambridge, UK)
CMR Surgical wurde 2014 in Cambridge, England gegründet und brachte das Versius® Surgical Robotic System auf den Markt. Das System ist CE-zertifiziert und aktuell nur für den europäischen Markt verfügbar. Der Versius® verfügt über einen modularen Aufbau aus unabhängig voneinander im OP-Saal zu platzierenden Modulen (bedside units = BSU). Hierbei können flexibel ein Kameramodul und bis zu drei bis vier Instrumentenmodule verwendet werden. Ein Modul besteht je aus einem fahrbaren Unterteil, dem artikulierenden robotischen Arm sowie dem jeweiligen Instrument. Die Module sind dem menschlichen Arm nachempfunden und bieten zwischen dem „Ellenbogen-Gelenk“ sowie dem „Hand-Gelenk“ sieben Freiheitsgrade. Die 5-mm-Instrumente sind je Modul flexibel austauschbar. Für die Kamera Optik wird ein 11-mm-Trokar benötigt. Die Konsole ist mit einem 3D-HD-Bildschirm ausgestattet und kann sowohl sitzend als auch stehend bedient werden und bietet somit einen entscheidenden ergonomischen Vorteil. Bedient werden die Instrumente mit einem der Gaming Industrie nachempfundenen Controller ohne separate Fußpedale. Das offene Design der Konsole fördert zudem die Kommunikation zwischen Chirurg:innen und dem OP-Team. Das modulare Design bietet sowohl die Möglichkeit der flexiblen Platzierung der Module am Patienten als auch eines einfachen Transfers des Systems zwischen OP-Sälen. Bislang wurde das System vor allem in der Kolonchirurgie erfolgreich angewendet [8].
Enos™ Surgical System (Titan Medical™, Toronto, Kanada)
Das Enos™ Surgical System von Titan Medical™ (ehemals SPORT Surgical System) stellt, im Gegensatz zu den anderen robotischen Operationssystemen, ein Single-Port Device mit einer Single-Arm Konfiguration dar. Durch einen 25-mm-Zugang werden zwei Kamerasysteme (2D und 3D) sowie zwei 8-mm-Instrumente eingeführt. Die multiartikulierenden Instrumente verfügen über eine elegante wellenförmige Bewegungsweise. Aktuell sind acht verschiedene Instrumente verfügbar. Analog zu anderen robotischen Operationssystemen verfügt auch der Enos™ über ein offenes Konsolendesign, welches mit einem 3D-HD-Display, Fußtritten und Controllern ausgestattet ist. Das System wurde bereits im präklinischen Setting in den USA und in Europa erfolgreich getestet und findet seinen Anwendungsbereich vor allem in der Gynäkologie. Aktuell befindet sich das System weiterhin in der Entwicklungsphase. Laut Hersteller ist eine Einführung in den amerikanischen Markt mit entsprechender FDA-Zulassung 2024 geplant.

Abb. 5: Ein offenes Konsolendesign, die Möglichkeit einer Bedienung im Stehen sowie ein der Gaming Industrie nachempfundener Controller bieten höchsten ergonomischen Komfort.
Senhance® Surgical System (Asensus Surgical US, Inc., ehemals Transenterix, Durham, NC, USA)
2016 auf dem Markt gebracht, stellt das Senhance® Surgical System aktuell das einzige robotische Operationssystem mit haptischem Feedback dar. Es handelt sich hierbei ebenfalls um ein Multiportsystem mit flexibel zu platzierenden Modulen. Die Konsole verfügt über ein offenes Design sowie einen 3D-HD-Bildschirm. Die Bedienelemente sind in Handhabung und Design, Instrumenten der konventionellen Laparoskopie nachempfunden und verfügen über ein haptisches Feedback. Die Kameraführung wird, anders als bei bisherigen Systemen, über ein Infrarot Eye Tracking durchgeführt. Chirurg:innen steuern somit die Kameraführung durch Fokussieren des Blickes auf bestimmte Strukturen oder neigen des Kopfes nach vorne zum Heranzoomen. Ein ergonomisch geformter Stuhl sorgt für höchsten Sitzkomfort. Die 5-mm-Instrumente sind wiederverwendbar und mit Standard Trokaren kompatibel. Neben dem Da Vinci ist dieses System das einzige, das über 3-mm-Instrumente verfügt und somit auch für die Kinderchirurgie zugelassen ist [9]. Die „TRUST“ Studie (The TransEnterix European Patient Registry for Robotic-Assisted Laparoscopic Procedures in Urology, Abdominal, Thoracic, and Gynecologic Surgery) konnte bereits eine erfolgreiche Einführung des Systems in fünf chirurgischen Zentren in ganz Europa mit > 800 Operationen zeigen [10].
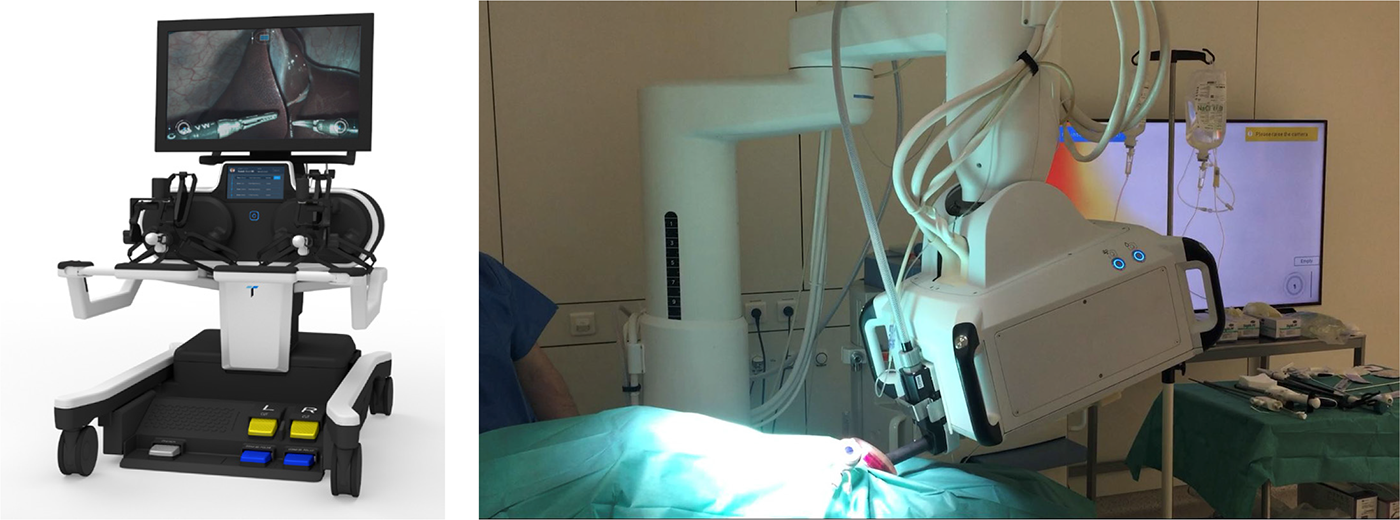
Abb. 6: Das Single-Port Device Enos™ verfügt über multiartikulierende Instrumente, die über einen 25-mm-Port eingeführt werden sowie über ein offenes Konsolendesign mit Controllern und Fußtritten.
Dexter (Distalmotion, Epalinges, Schweiz)
Dexter ist eine Schweizer Firma, die sich zur Aufgabe gemacht hat, die Robotik zu demokratisieren und somit für jeden verfügbar zu machen. Im Gegensatz zu anderen Systemen werden die modularen Elemente des Systems mit im eigenen Haus verfügbaren Komponenten kombiniert. So ist das Kameramodul mit allen gängigen Laparoskopie-Kamerasystemen kompatibel und kann sowohl mit einen 2D- als auch an einen 3D-Turm verbunden werden. Die vom Hersteller verfügbaren 8-mm-Instrumente beinhalten lediglich das Basisinstrumentarium, wie einen Nadelhalter oder eine Fasszange. Spezielle Instrumente wie der LigaSure™ oder ein Zirkularstapler müssen aus dem eigenen Repertoire entnommen werden, machen hierdurch die Anwendung des Systems jedoch einfach und kostengünstig. Die Konsole bietet ein offenes Konzept ohne eigenen Bildschirm und wird steril bedient, sodass ein Wechsel zwischen dem robotischen System und der konventionellen Laparoskopie jederzeit flexibel möglich bleibt. Das System wirbt mit maximaler Kompatibilität und Nutzerfreundlichkeit und ist seit Dezember 2020 CE-zertifiziert.
avatera-System (avateramedical GmbH, Jena, Deutschland)
Gegründet 2011, repräsentiert das avatera-System das erste deutsche robotische Operationssystem. Das Design ist dem Da Vinci sehr ähnlich. Das System besteht aus einer Robotikeinheit mit vier robotischen Armen sowie einer dem Arbeiten am Mikroskop nachempfundenen Konsole. Die QXGA-Auflösung des Displays zeigt eine hohe Farbtreue. Die 5 mm-Instrumente artikulieren in sieben Freiheitsgraden und sind nicht wiederverwendbar.

Abb. 7: Das Dexter System zeigt maximale Kompatibilität und Flexibilität zwischen der robotischen und laparoskopischen Chirurgie.

Abb. 8: Das Hugo™ RAS System mit der Touch Surgery™ Enterprise Video Management und Analyseplattform bietet durch die Kombination aus robotischer Technik und Methoden der künstlichen Intelligenz das erste System, das eine einfache Qualitätssicherung und Analyse der durchgeführten Operationen ermöglicht.
Hugo™ RAS System (Medtronic, Dublin, Irland)
Auch Medtronic hat mit dem Hugo™ RAS System, welches im Juni 2021 das erste Mal die klinische Anwendung am Menschen fand, ein robotisches Operationssystem auf dem Markt gebracht. Das System folgt einem modularen Design und kann entweder mit 3 bis 4 Instrumentenmodulen als vollwertiges robotisches Operationssystem oder mit einem Instrumentenmodul als Assistenz für laparoskopische Operationen verwendet werden. Die Konsole folgt einem offenen Design und ist mit einem 3D-HD-Display ausgestattet. Zudem verfügt die Konsole über mindestens sechs Fußpedale für die Kameraführung und Anwendung von bipolaren und monopolaren Instrumenten. Das System hat die CE-Zertifizierung für die urologische und gynäkologische Anwendung. Interessanterweise kombiniert das Hugo™ RAS System mit der Touch Surgery™ Enterprise Video Management und Analyseplattform Methoden der künstlichen Intelligenz mit robotischer Technik. Die Software verbindet den OP mit einer Cloud und lässt eine einfache und sichere Speicherung der OP-Daten und OP-Videos zu, die später zur Ansicht, aber auch zur Analyse und Qualitätssicherung zur Verfügung stehen. Inwiefern diese Software im Rahmen des europäischen Datenschutzes anwendbar ist, bleibt abzuwarten.
Tab. 1: Vergleich der verschiedenen robotischen Operationssysteme
|
Da Vinci |
Versius® |
Enos™ |
Senhance® |
Dexter |
avatera |
Hugo™ |
|
|
CE Zertifizierung |
ü |
ü |
x |
ü |
ü |
ü |
ü |
|
FDA Zertifizierung |
ü |
x |
2024 |
ü |
x |
x |
x |
|
Robotikeinheit |
Robotikeinheit mit 4 Armen |
Modular 3-4 Instrumente+ Kamera |
Robotikeinheit Single-Port Device |
Modular |
Modular |
Robotikeinheit mit 4 Armen |
Modular |
|
Konsolendesign |
Geschlossen |
Offen |
Offen |
Offen |
Offen + eigener Videoturm |
Geschlossen |
Offen |
|
Fußtritte |
ü |
x |
ü |
ü |
(ü) |
ü |
ü |
|
Anzahl Instrumente |
3 |
3-4 |
2 |
N.A. |
2 |
3 |
3-4 |
|
Instrumentengröße |
3-8 mm |
5mm |
25mm Zugang |
3-5mm |
8mm |
5mm |
8mm |
|
Ergonomischer Vorteil |
Keiner |
Konsole im Stehen bedienbar |
Offene Konsole mit ergonomischer Sitzgelegenheit |
Offene Konsole mit ergonomischer Sitzgelegenheit |
Offenes Design ohne integrierten Videoturm |
keiner |
Offene Konsole mit ergonomischer Sitzgelegenheit |
|
Besonderheit |
Marktführer |
Modulares Design, keine Fußtritte |
Single-Port Device |
Haptisches Feedback |
Kompatibilität |
Deutsches Unternehmen |
Touch Surgery™ Video Management Plattform |
Literatur
[1] Stephani, V., Busse, R., and Geissler, A., Benchmarking der Krankenhaus-IT: Deutschland im internationalen Vergleich, in Krankenhaus-Report 2019: Das digitale Krankenhaus, J. Klauber, et al., Editors. 2019, Springer Berlin Heidelberg: Berlin, Heidelberg. p. 17-32.
[2] Wilhelm, D., Kranzfelder, M., Ostler, D., Stier, A., Meyer, H.J., and Feussner, H., [Digitalization in surgery : What surgeons currently think and know about it-results of an online survey]. Chirurg, 2020. 91(1): p. 51-59.DOI: 10.1007/s00104-019-01043-3.
[3] Gisbertz, S.S., Hagens, E.R.C., Ruurda, J.P., Schneider, P.M., Tan, L.J., Domrachev, S.A., Hoeppner, J., and van Berge Henegouwen, M.I., The evolution of surgical approach for esophageal cancer. Ann N Y Acad Sci, 2018. 1434(1): p. 149-155.DOI: 10.1111/nyas.13957.
[4] Catanzarite, T., Tan-Kim, J., Whitcomb, E.L., and Menefee, S., Ergonomics in Surgery: A Review. Female pelvic medicine & reconstructive surgery, 2018. 24(1): p. 1-12.DOI: 10.1097/SPV.0000000000000456.
[5] Van’t Hullenaar, C.D.P., Hermans, B., and Broeders, I., Ergonomic assessment of the Da Vinci console in robot-assisted surgery. Innov Surg Sci, 2017. 2(2): p. 97-104.DOI: 10.1515/iss-2017-0007.
[6] Franasiak, J., Craven, R., Mosaly, P., and Gehrig, P.A., Feasibility and acceptance of a robotic surgery ergonomic training program. JSLS : Journal of the Society of Laparoendoscopic Surgeons, 2014. 18(4): p. e2014.00166.DOI: 10.4293/JSLS.2014.00166.
[7] Fuchs, H., Ahn, F., Leers, J., Schröder, W., Höfler, C., and Bruns, C., P131 Revealing the ergonomic crisis of an upper gastrointestinal robotic surgeon – still a lot to improve in minimally invasive surgery. Diseases of the Esophagus, 2019. 32(Supplement_2).DOI: 10.1093/dote/doz092.131.
[8] Puntambekar, S.P., Rajesh, K.N., Goel, A., Hivre, M., Bharambe, S., Chitale, M., and Panse, M., Colorectal cancer surgery: by Cambridge Medical Robotics Versius Surgical Robot System-a single-institution study. Our experience. J Robot Surg, 2021.DOI: 10.1007/s11701-021-01282-9.
[9] Esposito, C., Autorino, G., Castagnetti, M., Cerulo, M., Coppola, V., Cardone, R., Esposito, G., Borgogni, R., and Escolino, M., Robotics and future technical developments in pediatric urology. Semin Pediatr Surg, 2021. 30(4): p. 151082.DOI: 10.1016/j.sempedsurg.2021.151082.
[10] Stephan, D., Darwich, I., and Willeke, F., The TransEnterix European Patient Registry for Robotic-Assisted Laparoscopic Procedures in Urology, Abdominal, Thoracic, and Gynecologic Surgery (“TRUST”). Surg Technol Int, 2021. 38: p. 103-107.DOI: 10.52198/21.Sti.38.Gs1394.
Müller D T, Stier R, Seeliger B, Fuchs H: Ergonomie in der Robotik – Ein Vergleich der verschiedenen Systeme. Passion Chirurgie. 2022 März; 12(03): Artikel 03_01.