Weder der tschechische Schriftsteller Karel Capek, als er in seinem Theaterstück „Rossum’s Universal Robots“ im Jahr 1921 erstmalig humanoide, intelligente Maschinen als flinke Arbeitskräfte beschrieb [1], noch James Cameron mit seinem Kinoerfolg „The Terminator“ 1984 hatten den heutigen Einsatz von Robotern bei minimalinvasiven chirurgischen Operationen im Sinn. Seit 1980 wurden mehr als 7,2 Millionen robotisch-assistierte Operationen in 67 Ländern weltweit durchgeführt [2]. Von 2016 bis heute hat sich die Zahl der robotisch-assistierten Operationen in der Viszeralchirurgie verfünffacht und neben der kolorektalen Chirurgie auch in der hepatobiliären, Magen- und Ösophaguschirurgie fest etabliert [3].
Mit der Gründung der Chirurgischen Arbeitsgemeinschaft „CA ROBIN“ im Jahr 2020 unterstreicht die DGAV die Bedeutung der Robotik in der Chirurgie [3]. Aufgrund der Ergonomie, des zügigen visuellen und taktilen Feedbacks sowie der intuitiven Handhabung ist die robotische minimalinvasive Chirurgie zur größten Innovation der letzten Jahrzehnte geworden. Sicherheit, Effizienz, Kosten-Nutzen Abwägungen sowie die großen Vorteile kleinerer Inzisionen und schnellerer Rekonvaleszenz sind Gegenstand mannigfaltiger wissenschaftlicher Studien. Die Interdependenz der künstlichen Intelligenz und Robotik wird jedoch oft vernachlässigt. Die Unreife der zu Grunde liegenden Technologie, mangelnde Transparenz und Regulierung sowie die Ungewissheit über das Ausmaß menschlicher Kontrolle führen zu Unsicherheit [4]. Somit obliegt das wahre Potential der Nutzung autonomer Roboter, die hoch-präzise, repetitive und vorprogrammierte Abläufe übernehmen, derzeit vorrangig der Industrie.
Der folgende Artikel soll neben einer Übersicht über das Zusammenspiel neuer Technologien in künstlicher Intelligenz und Robotik auch einen Ausblick auf das enorme Potenzial dieser Themen in der Chirurgie vermitteln.
Heute und Morgen in der robotischen Chirurgie
Künstliche Intelligenz wurde ursprünglich definiert als eine Wissenschaft, die Maschinen (in diesem Fall Robotern) die Fähigkeit vermittelt, Wissen zu erlangen, anzuwenden und auf der Basis logischer Schlussfolgerungen Entscheidungen zu treffen [5]. Obgleich dies primär vielversprechend erscheint, ist die chirurgische Robotik bislang nicht so weit fortgeschritten. Neben dem weltweit dominierenden Da-Vinci®-Modell von Intuitive Surgical, der zu den sogenannten „Master-Slave“-Systemen gehört, die vollständig auf den Handlungen des Operateurs angewiesen sind [1], unterscheidet man zwei weitere Kategorien von chirurgischen Robotern.
„Aktive“ Systeme führen eigenständig vorab programmierte Funktionen aus, um hoch standardisierte Aufgaben zu erledigen. „Semi-aktive“ Systeme bestehen aus einer menschlich gesteuerten sowie einer vorprogrammierten Einheit. Der aktive TSolution ONE®, vormals ROBODOC®, wurde erstmalig 1992 in der Endoprothetik bei Hüft- und Knie-Totalendoprothesen eingesetzt und erreichte gleichwertige Ergebnisse im Vergleich zu manueller Operation, wies jedoch in 10 Prozent der Fälle technische Schwierigkeiten auf [6].
2016 wurde der Smart Tissue Autonomous Robot (STAR®) zur Anlage von Dünndarmanastomosen im Schwein eingesetzt [7] und bewies ex vivo quantitative Überlegenheit gegenüber erfahrenen Chirurg:innen bei qualitativ gleichwertigen Ergebnissen. Semi-aktive Roboter, wie bespielsweise das CyberKnife®, finden ebenfalls bereits klinische Anwendung [7]. Konventionelle chirurgische Roboter imponieren mit Vorteilen wie Tremorreduktion und akkurateren Resektionsgrenzen. Zusätzlich hat die Kombination mit Algorithmen der künstlichen Intelligenz zu einer Reduktion technischer und menschlicher Fehler sowie verkürzten OP-Zeiten geführt [8].
Das Erlernen und die Automatisierung routinierter Abläufe finden in der Robotik mittels Computer Vision und maschinellem Lernen statt. Die Informationsverarbeitung geschieht entlang sogenannter künstlicher neuraler Netzwerke, die strukturell biologischen Neuronen ähneln. Zusammengefasst handelt es sich um Algorithmen, die anhand von Exposition gegenüber Bilddaten auf dem Pixellevel die Erkennung und Einordnung von Objekten erlernen. Hierzu sind unzähligen Stunden des Trainings dieser Algorithmen und auch große Mengen hoch-qualitativer und vielseitiger Operations-Videodaten vonnöten. Eine Verknüpfung dieser Videodaten mit klinisch relevanten und kontextuell maßgeschneiderten Annotationen und Algorithmen vermittelt der künstlichen Intelligenz in der Chirurgie das Potential maßgeblicher Risikominderung und Verbesserung des chirurgischen Trainings (siehe Abbildung 1).
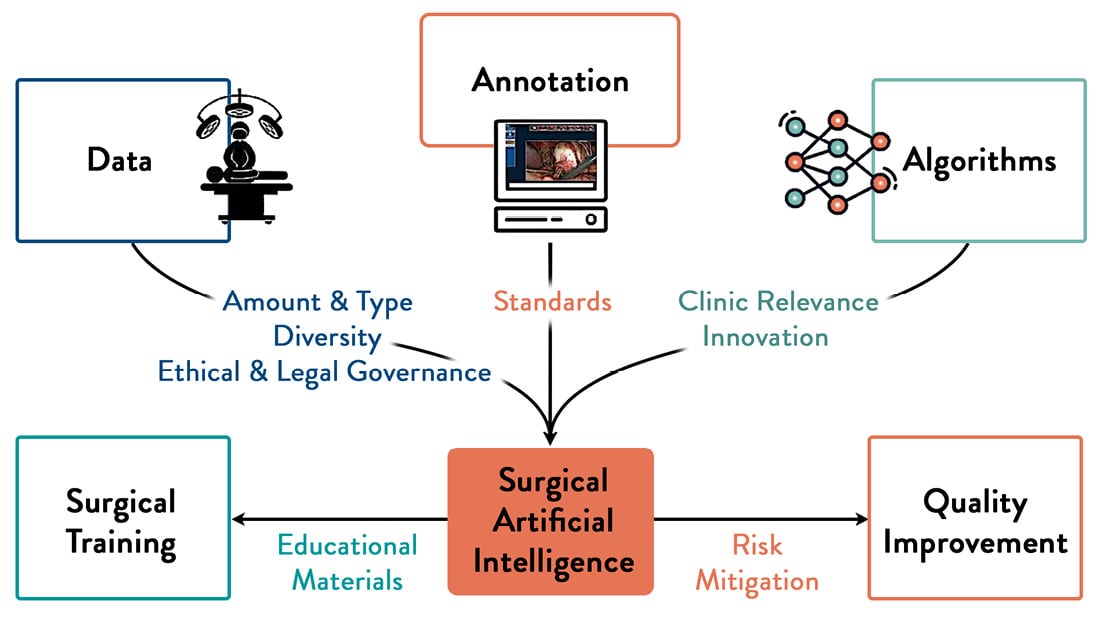
Abb.1: Voraussetzungen für die Etablierung und potenzielle Auswirkungen der künstlichen Intelligenz in der Chirurgie
Laut Panesar et al. gibt es drei wesentliche Faktoren, die die Handlungen autonomer Roboter beeinflussen:
- die Komplexität der zu erfüllenden Aufgabe,
- die vorherrschenden äußeren Einflussfaktoren und
- das Ausmaß der Unabhängigkeit vom Menschen [7].
Der intelligente chirurgische Roboter muss die durch visuelle und physikalische Sensoren aufgenommenen Informationen in die jeweilige Umgebung übersetzen und sinnvolle Handlungen daraus erzeugen. Eine Aufgabe, die in einem dynamischen Umfeld wie der Chirurgie nicht ganz trivial ist. Dennoch können heutige autonome Roboter bereits Organe und Gewebe differenzieren und visualisieren, Interaktionen zwischen Instrumenten und Gewebe analysieren, vor Komplikationen warnen und Handlungsvorschläge, möglicherweise sogar eine Art chirurgisches Navigationssystem, unterbreiten. Zudem birgt die Anwendung von „Reinforcement Learning“ das Potenzial von autonomen Robotern, mittels Feedback-Mechanismen die Fähigkeit zu vermitteln, sich anhand von Erfolgen und Misserfolgen kontinuierlich zu verbessern und über vorprogrammierte Aufgaben hinaus Fähigkeiten zu entwickeln [9].
Zusätzlich können kinematische Daten des Roboters die aktuelle Position, Orientierung und Bewegungen und Beschleunigung der individuellen Arme wiedergeben [10]. Durch die Anwendung neuraler Netzwerke war anhand dieser Daten zuvor eine konkrete Analyse, Differenzierung chirurgischer Fähigkeiten und Identifizierung des operierenden Chirurgen möglich [11]. Mit Hilfe von „Deep-Learning“-Modellen können kinematische Daten die nachfolgenden Positionen der Roboterarme – und dementsprechend auch chirurgische Handlungen – vorhersagen. Zukünftig können etwaige Daten, die von Operationen durch erfahrene Chirurgen gewonnen wurden, als Expertenrichtlinie herangezogen werden. Dies wäre nicht nur in der hiesigen Ausbildung junger minimalinvasiver Chirurg:innen von außerordentlichem didaktischem Wert, sondern könnte auch in Ländern mit eingeschränktem Zugang zu exzellenter chirurgischer Versorgung zu einer signifikanten Reduktion chirurgischer Komplikationen führen.
Das britische Start-up Digital Surgery veröffentlichte 2018 das erste dynamische System künstlicher Intelligenz,das analog zu „Google Maps“ einen chirurgischen Wegweiser darstellt. Die Kameradaten werden mithilfe von Computer Vision mit einer Art Katalog chirurgischer Szenarien korreliert und sind anschließend in der Lage, chirurgisch anspruchsvolle Situationen vorauszusehen und Lösungsansätze zu unterbreiten [2]. Verb surgical Inc und Intuitive Surgical zogen selbstverständlich nach. Die Möglichkeiten sind vielfältig, jedoch nicht nur durch die Unklarheit ethischer und rechtlicher Rahmenbedingungen gehindert, sondern auch durch die mangelnde Verfügbarkeit und Geheimhaltung der kinematischen Daten durch die Hersteller. Die Sorge einer möglichen Überlegenheit ist nicht ganz unberechtigt. Denn sobald die sensorische Verarbeitungskapazität und motorische Präzision eines Roboters die des Menschen übertrifft und dieser schneller und akkurater in der Lage ist, unvorhergesehene Ereignisse vorauszusehen, stellt sich die Frage der chirurgischen Überlegenheit.
Robotische Autonomie bedeutet Selbstständigkeit. Diese ist jedoch weniger als ein Zustand, sondern vielmehr als eine Skala zu betrachten, die von gänzlich menschlicher Steuerung bis hin zu vollständiger Unabhängigkeit reicht [7].
Ein weiter Weg voraus
Autonome Robotik ist bereits lange in anderen Gebieten, wie beispielsweise der Industrie, dem Militär, der Automobilbranche und der Luftfahrt etabliert. Der Einzug in die Chirurgie wird jedoch nicht nur durch ungeklärte ethische und rechtliche Aspekte, sondern auch durch mangelnde Akzeptanz neuer Technologien verhindert. Zudem schränken vor allem datenschutzrechtliche Gegebenheiten die Beschaffung und Verwendung der für das maschinelle Lernen erforderlichen minimalinvasiven Operationsvideos ein. Eine weitere entscheidende Frage bleibt, wer für eventuelle Komplikationen haftet, wenn eine Operation vollständig durch einen Roboter durchgeführt wurde.
Im autonomen Fahren wurde das Problem der mangelnden Verantwortlichkeit für potenzielle Fehler dadurch gelöst, dass menschliche Kontrolle in verschiedenen Ausprägungsgraden zu jeder Zeit gegeben sein muss. In unterschiedlichen Risikoszenarien ist demnach ein menschlicher Eingriff in das System im dementsprechenden Ausmaß erforderlich [12]. Hinzu kommen die mangelnde Kostenerstattung des Mehraufwandes und die daraus resultierende limitierte Studienlage zum operativen Vorteil der Robotik im Vergleich zur Laparoskopie [3].
Auf dem Weg zum intelligent lernenden, autonom agierenden chirurgischen Roboter, der unter menschlicher Supervision routinierte Operationsabläufe übernimmt, sind noch große Hürden zu überwinden und Regulationen zu etablieren. Das Potenzial, die Chirurgie durch künstliche Intelligenz in der Robotik zu verbessern, ist jedoch definitiv gegeben.
Literatur
[1] Lane, T. A short history of robotic surgery. Ann. R. Coll. Surg. Engl. 100, 5–7 (2018).
[2] Bhandari, M., Zeffiro, T. & Reddiboina, M. Artificial intelligence and robotic surgery: current perspective and future directions. Curr. Opin. Urol. 30, 48–54 (2020).
[3] Krüger, C. M. et al. DeRAS I – deutsche Situation der robotisch assistierten Chirurgie – eine Online-Survey-Studie. Chirurg 92, 1107–1113 (2021).
[4] Kelley, P. G. et al. Exciting, Useful, Worrying, Futuristic: Public Perception of Artificial Intelligence in 8 Countries. in Proceedings of the 2021 AAAI/ACM Conference on AI, Ethics, and Society 627–637 (Association for Computing Machinery, 2021).
[5] Nilsson, N. J. The Quest for Artificial Intelligence. (Cambridge University Press, 2009).
[6] Schulz, A. P. et al. Results of total hip replacement using the Robodoc surgical assistant system: clinical outcome and evaluation of complications for 97 procedures. Int. J. Med. Robot. 3, 301–306 (2007).
[7] Panesar, S. et al. Artificial Intelligence and the Future of Surgical Robotics. Ann. Surg. 270, 223–226 (2019).
[8] Shademan, A. et al. Supervised autonomous robotic soft tissue surgery. Sci. Transl. Med. 8, 337ra64 (2016).
[9] Peters, B. S., Armijo, P. R., Krause, C., Choudhury, S. A. & Oleynikov, D. Review of emerging surgical robotic technology. Surg. Endosc. 32, 1636–1655 (2018).
[10] Yang, C., Ma, H. & Fu, M. Robot Kinematics and Dynamics Modeling. in Advanced Technologies in Modern Robotic Applications (eds. Yang, C., Ma, H. & Fu, M.) 27–48 (Springer Singapore, 2016).
[11] Uemura, M. et al. Feasibility of an AI-Based Measure of the Hand Motions of Expert and Novice Surgeons. Comput. Math. Methods Med. 2018, 9873273 (2018).
[12] O’Sullivan, S. et al. Legal, regulatory, and ethical frameworks for development of standards in artificial intelligence (AI) and autonomous robotic surgery. Int. J. Med. Robot. 15, (2019).
Eckhoff JA, Meireles O: Künstliche Intelligenz in der Robotik – „What we have so far!“. Passion Chirurgie. 2022 März; 12(03): Artikel 03_02.