01.02.2017 Allgemeinchirurgie
Robotik in der Chirurgie
Seit den 80er Jahren des 20. Jahrhunderts werden minimal-invasive Techniken verwendet, um Patienten mit geringerem Trauma und daraus resultierender schnellerer Genesung zu operieren. Im Jahr 1983 erfolgte die erste laparoskopische Appendektomie durch den Kieler Gynäkologen Kurt Semm und 1987 führte der Franzose Philippe Mouret die erste laparoskopische Cholezystektomie durch [1]. Seither sind eine Vielzahl von weiteren OP-Indikationen sowie verschiedenste Techniken im Bereich der minimal-invasiven Chirurgie hinzugekommen.
Zu diesen Innovationen gehört die Roboter-Chirurgie. Das amerikanische Militär entwickelte einen OP-Roboter unter der Vorstellung, Patienten an entfernten Orten durch einen Spezialisten operieren zu können, zum Beispiel Soldaten in entfernten Kriegsgebieten oder auf/unter See. Die erste Roboter-Operation mit dem Prototyp der Firma Intuitive Surgical (genannt Mona Lisa) war eine Cholezystektomie, welche im März 1997 durch Jacques Himpens in Dendermonde (Belgien) erfolgte. Im darauf folgenden Jahr 1998 wurde im Herzzentrum Leipzig durch Dr. Mohr eine Bypass-Operation durchgeführt.
Zum aktuellen Zeitpunkt existiert zur Operation an menschlichem Weichgewebe ein einziges Roboter-Operationssystem, das da Vinci® Surgical System der kalifornischen Firma Intuitive Surgical. Im September 2016 sind laut Firmenangaben weltweit 3.803 da Vinci® Systeme in Betrieb, davon 2.501 in den USA, 644 in Europa, 476 in Asien und weitere 182 in der restlichen Welt [2].
Weitere Firmen arbeiten an der Entwicklung bzw. Marktreife von vergleichbaren Systemen, doch momentan besteht für das da Vinci® System eine Monopol-Stellung als einzigem von der amerikanischen Food and Drug Administration (FDA) zugelassenem System.
Das da Vinci® Surgical System stellt ein Master-Slave-Operationssystem dar. Der Chirurg sitzt an einer Konsole (Surgeon Console = Master) und bedient den eigentlichen Operationsroboter (Patient Side Cart, PSC) mit vier Armen (= Slave). Der Operateur sieht in der Konsole ein variabel vergrößerbares 3D-Bild des Operationssitus und steuert mit seinen Handbewegungen die OP-Instrumente (Endowrist Instruments) tragenden Roboterarme in Echtzeit. Besonders hervorzuhebende Positivmerkmale des Roboters sind die exzellenten, dem menschlichen Organismus überlegenen Freiheitsgrade der Instrumente (die menschlichen Gelenke haben zumeist zwei bis drei Freiheitsgrade, die Roboter-Instrumente weisen dagegen sieben Freiheitsgrade auf), die optimierte Einsicht in den Situs (3D-Kamerasystem mit bis zu zehnfacher optischer und bis zu 40-facher digitaler Vergrößerung), der Ausgleich des natürlichen Tremors des Operateurs und die ergonomischen Vorteile für den Chirurgen. Kritische Aspekte sind neben einer relevanten Lernkurve zur Durchführung der Operationen die Kosten (Anschaffung, Instandhaltung, Verbrauchsmaterial) des OP-Roboters. Die Initialkosten der Anschaffung sind abhängig davon, welches System (ältere Generation: Si, neuste Generation: Xi) und welche Ausstattung (zweite Konsole, Trainingsmodul, etc.) erworben wird. Grundsätzlich sind Kosten von ca. 1,5 bis 2 Mio. Euro für die Anschaffung und ca. 150.000 Euro pro Jahr für die Instandhaltung und Wartung zu kalkulieren. Die Kosten für Verbrauchsmaterialien schwanken je nach Einsatz der Instrumente, wobei ungefähre Kosten von 500 bis 1500 Euro (ohne Energy Device/Stapler) pro Operation anfallen.
Einsatzgebiete des Roboter-Operationssystem
Weltweit zeigt sich ein Trend an steigenden Operationszahlen durch den OP-Roboter. Es werden in den verschiedensten Fachgebieten sowohl benigne Erkrankungen als auch maligne Tumoren operiert [3].

In Deutschland führen multiple chirurgische Disziplinen in der heutigen Zeit Roboter-assistierte Operationen durch und es befinden sich zum Zeitpunkt Dezember 2016 insgesamt 88 Systeme in Deutschland im Einsatz. In der initialen Phase wurde das da Vinci® Surgical System federführend in der Urologie eingesetzt. Heutzutage erfolgen eine relevante Anzahl von Prostatektomien als auch weitere urologische Resektionen Roboter-assistiert. Der positive Roboter-Trend lässt sich an steigenden Zahlen der Roboter-assistierten Prostatektomien erkennen. Während im Zeitraum 2006 bis 2013 die Gesamtzahl an Prostatektomien um ca. 23 % abnahm, stiegen Roboter-Prostatektomien im Gegenteil dazu um 25 % an [4]. Ebenfalls gut etabliert ist die Roboter-Technik in der Gynäkologie, z. B. für Hysterektomien, pelvine Lymphadenektomien, etc.
In der Viszeralchirurgie werden Roboter-assistierte Operationen in einigen deutschen Kliniken durchgeführt, wobei es nur wenige Zentren mit größeren Fallzahlen bzw. langjähriger Expertise gibt. Einer kürzlich publizierten Umfrage zufolge liegt in der deutschen Viszeralchirurgie die jährliche Steigerungsrate der OP-Zahlen aktuell bei ca. 50 % [5].
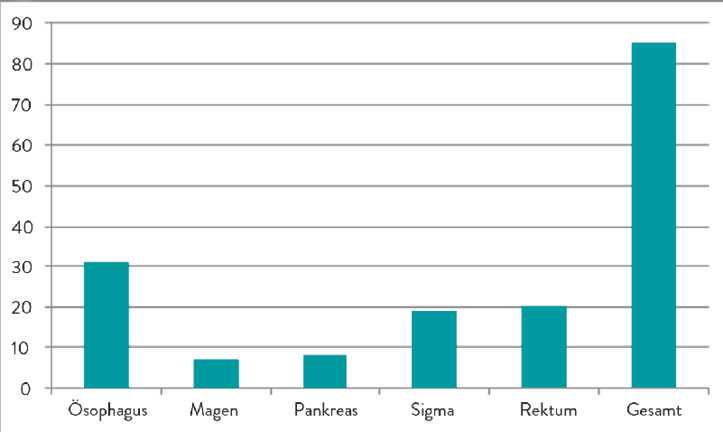
Tab. 1: Darstellung der mit dem da Vinci® Surgical System durchgeführten Operationen in der Klinik für Viszeral-, Thorax- und Gefäßchirurgie des Universitätsklinikums Dresden von 2013 bis 2016
Eigene Erfahrungen in der Klinik für Viszeral-, Thorax- und Gefäßchirurgie des Universitätsklinikums Dresden
In unserer Abteilung wurden im Zeitraum 2013 bis 2016 über 80 Operationen mit dem da Vinci® Surgical System durchgeführt (Tab. 1). Es handelt sich hierbei ausschließlich um viszeralchirurgische Tumorresektionen. Während in der Initialphase vermehrt kolorektale Operationen erfolgten, liegt der aktuelle Schwerpunkt auf der Operation von Ösophagus- und Pankreastumoren.
Roboter-assistierte Operationen weisen eine Vielzahl von Besonderheiten auf, die prä- und intraoperativ bedacht werden müssen. Obwohl die Instrumente des OP-Roboters eine ausgezeichnete Flexibilität aufweisen, ist das Setup aufgrund der Größe des Operationsroboters (Patient Side Cart, PSC) und der fixen Verbindung der am Patienten angedockten Roboterarme in seiner Flexibilität limitiert. Dies bedeutet, dass der Lagerung und dem Aufbau der Technik ein besonderes Maß an Aufmerksamkeit vor der Operation zukommen muss. Oftmals werden die Patienten im Vergleich zum laparoskopischen Vorgehen unterschiedlich gelagert. Diese Feinheiten müssen vom Team beherrscht werden und werden üblicherweise vom Operateur durchgeführt (Abb. 1). Die Lagerungskontrolle durch den Operateur gewinnt insbesondere in der Etablierungsphase dieser Operation an großer Bedeutung, um bei den längerdauernden Operation Lagerungsprobleme/-schäden zu vermeiden.
Wenn die Position des Patienten während der Operation verändert werden muss, ist ein Entfernen sämtlicher Instrumente aus dem Patienten sowie ein Abdocken der Roboterarme von den Ports notwendig. Die neuste Version des da Vinci® Surgical Systems, das sogenannte Xi System, trägt diesem Problem Rechnung und bietet die Option einen speziellen OP-Tisch zu erwerben, welcher diesen Vorgang überflüssig macht und sich synchronisiert mit den Roboterarmen intraoperativ bewegen lässt.

Abb. 1: Die Lagerung des Patienten spielt eine sehr wichtige Rolle. In diesem Fall kontrolliert der Chirurg die Armposition eines in modifizierter Seit-/Bauchlage liegenden Patienten zur Ösophagus-Resektion.
Entsprechend der vier Roboterarme ist es sinnvoll maximal vier da Vinci Ports (üblicherweise 8 mm wiederverwendbare Stahl-Ports) einzubringen. Hierbei sind die exakte Portpositionierung bzw. Mindestabstände zwischen den Ports und Roboterarmen zur Vermeidung von extrakorporalen Kollisionen der Hardware äußerst wichtig. Additiv zu den da Vinci Ports können handelsübliche Laparoskopie-Ports eingebracht werden, mit denen der Assistent den Chirurgen unterstützen kann, z. B. für Saugung, Retraktoren, moderne Energy Devices, etc. (Abb. 2, 3).

Abb. 2: Darstellung des Aufbaus des da Vinci® Surgical System: der Chirurg (links hinten im Bild) führt die Operation mittels Bedienung der Roboterarme durch, während der Assistent steril am OP-Tisch unterstützt.
Die in unserer Klinik durchgeführten Roboter-assistierten Operationen stellen viszeralchirurgische Eingriffe dar, bei welchen die Vorzüge des Systems besonders zum Tragen kommen. Prinzipiell sind dies Operationen, bei denen die optimierte Darstellung des Situs durch das vergrößerte 3D-Bild des Roboters optimale Bedingungen zur Präparation und Schonung wichtiger anatomischer Strukturen ermöglicht. Dies betrifft beispielsweise die Präparation der Nerven bei der Rektumresektion (Abb. 4) oder die Lymphadenektomie inklusive Schonung des Nervus recurrens bei der Ösophagusresektion (Abb. 5).
Sehr vorteilhaft ist der Einsatz des OP-Roboters weiterhin beim intrakorporalen Nähen. Die vermehrten Freiheitsgrade der robotischen Endowrist-Instrumente erleichtern das Nähen von Anastomosen signifikant, was wir bei der Rekonstruktion nach einer Ösophagus- oder Pankreasresektion (Abb. 6) nutzen.
Im Fazit sehen wir für spezielle viszeralchirurgische Operation mit potenziell hoher Morbidität deutliche potenzielle Vorteile der Roboter-Chirurgie und versuchen diese durch Durchführung und Teilnahme an Studien zu belegen. In der Zukunft wird sich zeigen, ob die klinischen Vorteile des OP-Roboters die ökonomischen Zwänge übertreffen und sich Roboter-Chirurgie in der Viszeralchirurgie etablieren kann.

Abb. 3: Nahaufnahme der im Patienten befindlichen Ports und Roboter-Instrumente (Si-System).
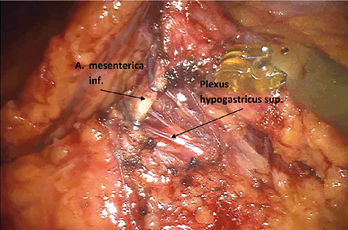
Abb. 4: Robotische Präparation der Arteria mesenterica inferior mit Darstellung der engen Lagebeziehung zum Plexus hypoogastricus superior. (Foto aus [6])
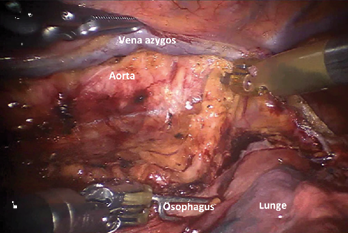
Abb. 5: Bei der Roboter-assistierten Ösophagusresektion ist sowhl die exzellente Einsicht des Situs als auch das verbesserte Nähen der Anastomose durch den Roboter von großem Vorteil (Foto aus [6])
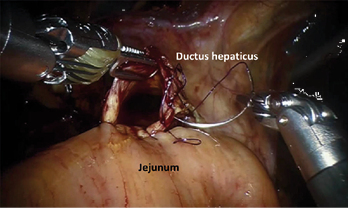
Abb. 6: Anlage einer Hepatikojejunostomie im Rahmen der Rekonstruktion einer robotischen Whipple-Operation. Sicht und minimal-invasiven Nähen der Anastomose werden druch den Roboter optimiert (Foto aus [6]).
Literatur
[1] Spaner SJ, Warnock GL: A brief history of endoscopy, laparoscopy, and laparoscopic surgery. J Laparoendosc Adv Surg Tech A 1997, 7(6):369-373.
[2] http://phx.corporate-ir.net/phoenix.zhtml?c=122359&p=irol-faq#22324.
[3] Salman M, Bell T, Martin J, Bhuva K, Grim R, Ahuja V: Use, cost, complications, and mortality of robotic versus nonrobotic general surgery procedures based on a nationwide database. Am Surg 2013, 79(6):553-560.
[4] Groeben CK, R.; Baunacke, M.; Wirth, M.P.; Huber, J.: High volume is the key for improving in-hospital outcomes after radical prostatectomy: a total population analysis in Germany from 2006 to 2013. . World J Urol 2016, (in press).
[5] Kissler HJ, Bauschke A, Settmacher U: [First national survey on use of robotics for visceral surgery in Germany]. Chirurg 2016, 87(8):669-675.
[6] Kirchberg J, Mees T, Weitz J: [Robotics in the operating room : Out of the niche into widespread application]. Chirurg 2016, 87(12):1025-1032.
Mees S.T. / Kirchberg J. / Weitz J. Robotik in der Chirurgie. Passion Chirurgie. 2017 Februar, 7(02): Artikel 03.
Autor des Artikels
PD Dr. Sören Torge Mees
Oberarzt, Facharzt für Chirurgie, Viszeralchirurgie und Spezielle ViszeralchirurgieKlinik und Poliklinik für Viszeral-, Thorax- u. GefäßchirurgieUniversitätsklinikum Carl Gustav Carus an der Technischen Universität DresdenFetscherstraße 7401307Dresden kontaktierenWeitere aktuelle Artikel

01.05.2024 Allgemeinchirurgie
Hernien als Zufallsbefund im Rahmen einer adipositaschirurgischen Operation
Eine Adipositas stellt aufgrund einer durch sie bedingten Erhöhung des

19.12.2023 Allgemeinchirurgie
Aktualisierte S3-Leitlinie zu Karzinomen der Speiseröhre
Ösophagus-Operationen sollten nur von in dieser Operation erfahrenen Chirurginnen und Chirurgen durchgeführt werden.

25.05.2023 Allgemeinchirurgie
Julius-Springer-Preis für Chirurgie an Dr. Saskia Meißler
Die Arbeit Was der (Allgemein- und Viszeral-) Chirurg über die Thromboseprophylaxe wissen sollte wurde ausgezeichnet.

27.10.2022 Vergütung
BfArM veröffentlicht OPS 2023
Das Bundesinstitut für Arzneimittel und Medizinprodukte (BfArM) in Bonn/Köln hat mit Meldung vom 27.10.2022 die endgültige Fassung des Operationen- und Prozedurenschlüssels (OPS) 2023 veröffentlicht.

Korrespondierende:r Autor:in
PD Dr. Sören Torge Mees
Oberarzt, Facharzt für Chirurgie, Viszeralchirurgie und Spezielle ViszeralchirurgieKlinik und Poliklinik für Viszeral-, Thorax- u. GefäßchirurgieUniversitätsklinikum Carl Gustav Carus an der Technischen Universität DresdenFetscherstraße 7401307Dresden
Lesen Sie PASSION CHIRURGIE!
Die Monatsausgaben der Mitgliederzeitschrift können Sie als eMagazin online lesen.